
High-Level and Design Considerations
With our sensor setup requiring significant processing power, and with our motor control scheme requiring precise timing and synchronization, we determined that our minimal computing configuration would consist of two Arduino Unos communicating via UART. Instructions for robot movement would be handled by the primary Arduino, which was also responsible for sensor communication. Granular motor control was handled by the secondary Arduino. Motor control instructions (Forward, Reverse, Left, Right with power level) were sent via UART from the primary Arduino to the secondary Arduino.
Robot Control
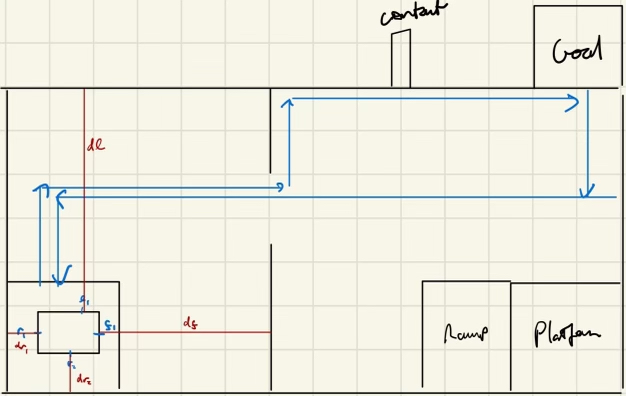
Robot movement was and game playing were controlled by the primary Arduino. The control sequence was broken into two phases, in accordance with the game rules and points scoring structure. In the first phase, the robot would first contact the contact zone, then deposit balls at the goal, then (possibly) climb the ramp, and return to the starting zone. In the second phase, having maximized one-time points, the robot would lap from the start zone to the goal as fast as possible to maximize uncapped points.
Phase 1 was comprised of start zone orientation, translation until the frontal and side distance measurements indicated that the robot was centered in the gap between the start zone and the goal zone, movement and translation to the contact zone and goal zone, ramp climbing, and return to the start zone. While we retained the ramp for checkoff, because the ramp point bonus was small (4 points) for a significant time penalty of approximately 20 seconds, we eliminated the ramp from the Phase 1 control sequence for the competition and elected to only deposit balls in Phases 1 and 2.
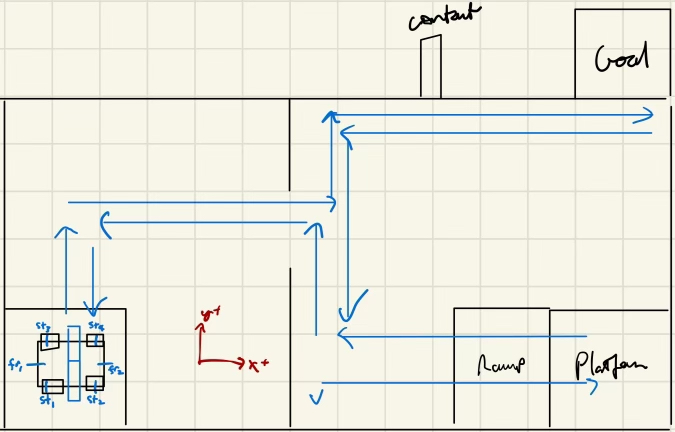
Phase 2 was comprised of start zone orientation via wall contact, followed by a translate-forward-translate-ball drop-translate-reverse-translate sequence, with transitions determined through frequent coordinate determination.
Speed and Direction Control
Speed and direction were directly controlled by the secondary Arduino. With control commands sent by the primary Arduino via a UART connection, the motor control Arduino only had to execute each command without significant delay between command for the first motor and command for the last motor.
Through extensive modularization, we managed to minimize control latency to manageable levels. However, due to wheel slippage, we still encountered issues with precise robot orientation maintenance through each lap of the course.
Inter-Computer Communication
Inter-computer communication was handled through a UART connection between the two Arduinos. This was possible because the sensors communicated with the primary Arduino via I2C.
For speed, the control commands were sent from the primary Arduino as a single byte, with the most significant four bits representing the motor command (forward, reverse, left, right, single-motor control), and the least significant four bits representing the power level (mapped from the 0:15 range allowed with four bits onto the 0:1000 range required for stepper motor control from 0 steps/sec to 1000 steps/sec). Encoding and decoding are shown below:
// encode command
void send_control_command( int command, int power_level ) {
command = command << 4;
byte bitVal = command + power_level;
Serial.write(bitVal);
}
// decode command
byte data_recv = Serial.read();
int command = (data_recv & UPPER_4_BIT_MASK) >> 4;
int speed = map( data_recv & LOWER_4_BIT_MASK, 0, MAX_PL, 0, MAX_SPEED );
Primary Control Code:
/*
- This script controls the master Arduino.
- Input: Button press, 4x TF Luna sensor readings.
- Output: Motor control commands (via UART), dispensing servo control (via digital IO), audio control (via digital IO).
- Commented code snippets save program memory space, but as of 3/6 are functional.
*/
#include
#include
#include
#include
#include
// --------------------------------------------------------------------------------
/*
- ALL CONSTANTS DEFINED BELOW
*/
#define SPEAKER_PIN 4 // IO pin to control speaker relay
#define SERVO_PIN 9 // PWM pin to control release servo
#define MAX_PL 15
#define NUM_LUNAS 4
#define LUNA_FRONT_IDX 0
#define LUNA_REAR_IDX 3
#define LUNA_LEFT_IDX 2
#define LUNA_RIGHT_IDX 1
#define WIDTH_OF_BOT 8
#define LENGTH_OF_BOT 19
#define COURSE_WIDTH 124
#define COURSE_LENGTH 92
#define EQUIDISTANT_TOL_CM 4
#define FRONT_START_CM 51
#define SIDE_START_CM 84
#define PROXIMITY_TOL_CM 6
#define REV_WALL_DIST_CM 150
#define START_REV_TIME_MS 1200
#define RAMP_TIME_MS 7000 // CHANGE: was 5000
#define OFFLOAD_TIME_MS 2000 // offload interval - REFINE
#define DISPENSE_CORRECTION_MS 200 // time to correct for servo actuator
#define CENTER_ANGLE 100
#define OFFSET_ANGLE_RIGHT -26
#define OFFSET_ANGLE_LEFT 25
#define RELOAD_TIME 1000 // time to reload balls in start zone
#define TOTAL_TIME_MS 130000
Servo servo1;
const int defaultAddress = TFL_DEF_ADR;
uint8_t ADDRS[NUM_LUNAS] = {0x12, 0x16, 0x18, 0x20}; // Pre-defined new addresses
TFLI2C tflI2C[NUM_LUNAS];
bool side_of_board = false; // false = left faces goal (right side of board), true = right faces goal (left side of board)
int phase_1_stage = 0;
bool stop_rotation = false;
bool start_interval = false;
bool start_interval_dispense = false;
int phase_2_stage = 0;
unsigned long start_time_ms = 0;
unsigned long prev_time = 0;
unsigned long curr_time = 0;
unsigned long prev_time_dispense = 0;
int luna_front = 0;
int luna_rear = 0;
int luna_left = 0;
int luna_right = 0;
// --------------------------------------------------------------------------------
/*
- HELPER FUNCTIONS
- LiDAR reading:
- get_luna_front();
- get_luna_rear();
- get_luna_left();
- get_luna_right();
- Motor control (speed argument is % of max. Call with nonzero argument for move, zero argument for stop):
- send_control_command(int command, int power_level);
- set_speed_RF(int value);
- set_speed_LF(int value);
- set_speed_RR(int value);
- set_speed_LR(int value);
- set_speed_FWD(int value);
- set_speed_REV(int value);
- set_speed_LEFT(int value);
- set_speed_RIGHT(int value);
- dispenser_rotate_left();
- dispenser_rotate_right();
- dispenser_rotate_center();
*/
int16_t get_luna_front() {
int16_t tfDist;
tflI2C[LUNA_FRONT_IDX].getData(tfDist, ADDRS[LUNA_FRONT_IDX]);
return ( tfDist );
}
int16_t get_luna_rear() {
int16_t tfDist;
tflI2C[LUNA_REAR_IDX].getData(tfDist, ADDRS[LUNA_REAR_IDX]);
return ( tfDist );
}
int16_t get_luna_left() {
int16_t tfDist;
tflI2C[LUNA_LEFT_IDX].getData(tfDist, ADDRS[LUNA_LEFT_IDX]);
return ( tfDist );
}
int16_t get_luna_right() {
int16_t tfDist;
tflI2C[LUNA_RIGHT_IDX].getData(tfDist, ADDRS[LUNA_RIGHT_IDX]);
return ( tfDist );
}
void send_control_command( int command, int power_level ) {
command = command << 4;
byte bitVal = command + power_level;
Serial.write(bitVal);
}
/*
void set_speed_RF( int speed ) {
send_control_command( 12, (int)(speed*MAX_PL/100) );
}
void set_speed_LF( int speed ) {
send_control_command( 13, (int)(speed*MAX_PL/100) );
}
void set_speed_RR( int speed ) {
send_control_command( 14, (int)(speed*MAX_PL/100) );
}
void set_speed_LR( int speed ) {
send_control_command( 15, (int)(speed*MAX_PL/100) );
}
*/
void move_fwd( int speed ) {
send_control_command( 1, (int)(speed*MAX_PL/100) );
}
void move_rev( int speed ) {
send_control_command( 2, (int)(speed*MAX_PL/100) );
}
void move_left( int speed ) {
send_control_command( 3, (int)(speed*MAX_PL/100) );
}
void move_right( int speed ) {
send_control_command( 4, (int)(speed*MAX_PL/100) );
}
void move_rotate( int speed ) {
send_control_command( 5, (int)(speed*MAX_PL/100) );
}
bool dispenser_rotate_right( unsigned long curr_time, unsigned long prev_time_dispense ) {
// servo1.write(50);
// if ( !start_interval_dispense ) {
// prev_time_dispense = millis();
// start_interval_dispense = true;
// servo1.write( CENTER_ANGLE + 10 );
// }
if ( (curr_time - prev_time_dispense) > DISPENSE_CORRECTION_MS ) {
// move dispense actuator to position 0
servo1.write( CENTER_ANGLE + OFFSET_ANGLE_RIGHT );
//start_interval_dispense = false;
}
else{
servo1.write( CENTER_ANGLE + 10 );
}
}
void dispenser_rotate_left( unsigned long curr_time, unsigned long prev_time_dispense) {
// servo1.write(120);
// if ( !start_interval_dispense ) {
// prev_time_dispense = millis();
// start_interval_dispense = true;
// servo1.write( CENTER_ANGLE - 10 );
// }
if ( (curr_time - prev_time_dispense) > DISPENSE_CORRECTION_MS ) {
// move dispense actuator to position 0
servo1.write( CENTER_ANGLE + OFFSET_ANGLE_LEFT );
//start_interval_dispense = false;
}
else{
servo1.write( CENTER_ANGLE - 10 );
}
}
void dispenser_rotate_center() {
servo1.write( CENTER_ANGLE );
}
// --------------------------------------------------------------------------------
/*
- Components tested:
- TF Luna 1, 2, 3, 4 (commented out but should prob keep it in)
- Dispensing test (swivel to indicate ready)
- Motors tested sequentially (not here tho)
*/
void setup() {
// initialize ICC
Serial.begin(9600);
Wire.begin();
// initialize digital IO connections
pinMode( SPEAKER_PIN, OUTPUT );
servo1.attach( SERVO_PIN );
dispenser_rotate_center(); // sets the servo perpendicular to hopper
// test TF Luna
if ( !get_luna_front() || !get_luna_rear() || !get_luna_left() || !get_luna_right() ) {
abort();
}
//test dispenser
/*
delay(2500);
dispenser_rotate_right();
delay(2500);
dispenser_rotate_center();
delay(2500);
dispenser_rotate_left();
delay(2500);
dispenser_rotate_center();
*/
// if success, set phase 1 stage as 1 and begin driving
phase_1_stage = 1;
start_time_ms = millis();
}
// --------------------------------------------------------------------------------
/*
- Control sequence functions
- Testing (comment these out to save program memory):
- get_all_sensors();
- test_communication_functionality();
- Phase 1:
- 1.1: align in start zone (and set +/- translation directions (which sets dispensing direction))
- 1.2: translate in + direction until opening
- 1.3: move fwd until timer (so we hit contact before dropping balls)
- 1.4: translate in + direction until wall
- 1.5: move fwd until wall (hitting contact along way)
- 1.6: deposit balls
- 1.7: reverse until wall
- 1.8: translate until wall in - direction
- 1.9: move forward until timer expires at max torque (360rpm)
- 1.10: reverse until timer expires (equivalent to up timer)
- 1.11: translate in + direction until gap + timer
- 1.12: reverse until wall
- 1.13: translate in - direction until wall (starting zone reentered)
- Phase 2:
- 2.1: translate in + direction until gap
- 2.2: move fwd until wall
- 2.3: translate in + direction until wall
- 2.4: deposit balls
- 2.5: reverse until wall
- 2.6: translate in - direction until gap detected and timer (such that bot fits)
- 2.7: reverse until wall
- 2.8: translate in - direction until wall
*/
void get_all_sensors() {
Serial.print("Luna Front: ");
Serial.println(get_luna_front());
Serial.print("Luna Rear: ");
Serial.println(get_luna_rear());
Serial.print("Luna Left: ");
Serial.println(get_luna_left());
Serial.print("Luna right: ");
Serial.println(get_luna_right());
Serial.println("");
delay(1000);
}
/*
void test_communication_functionality() {
int speed = 50;
move_fwd( speed );
// move_rev( speed );
// move_left( speed );
// move_right( speed );
}
*/
// orient in start zone
void phase_1_1() {
// get sensor readings
luna_front = get_luna_front();
luna_rear = get_luna_rear();
luna_right = get_luna_right();
luna_left = get_luna_left();
// rotate ccw until (left or right) and rear lidar read same value. use known frontal tolerance to approximate correct orientation, also use (other side sensor)
bool stopConditionLeftSide = ( abs( luna_right + luna_left + WIDTH_OF_BOT - COURSE_WIDTH ) < 2 ) && ( abs( luna_front + luna_rear + LENGTH_OF_BOT - COURSE_LENGTH ) < 2 ) && ( luna_left < luna_right ) && ( luna_rear < luna_front ) && ( luna_front < 130 ) && ( luna_rear < 130 ) && ( luna_left < 130 ) && ( luna_right < 130 );
bool stopConditionRightSide = ( abs( luna_right + luna_left + WIDTH_OF_BOT - COURSE_WIDTH ) < 2 ) && ( abs( luna_front + luna_rear + LENGTH_OF_BOT - COURSE_LENGTH ) < 2 ) && ( luna_left > luna_right ) && ( luna_rear < luna_front ) && ( luna_front < 130 ) && ( luna_rear < 130 ) && ( luna_left < 130 ) && ( luna_right < 130 );
if ( stopConditionLeftSide ) {
side_of_board = true; // orients all other commands. left => robot moves right toward goal. + -> right, - -> left.
stop_rotation = true;
}
else if ( stopConditionRightSide ) {
side_of_board = false; // orients all other commands. right => robot moves left toward goal.
stop_rotation = true;
}
else {
move_rotate( 20 );
}
if ( stop_rotation ) {
if ( side_of_board ) {
move_left( 20 );
}
else {
move_right( 20 );
}
if ( !start_interval ) {
prev_time = millis();
start_interval = true;
}
else {
if ( (millis() - prev_time) > START_REV_TIME_MS ) {
move_right( 0 );
start_interval = false;
stop_rotation = false;
phase_1_stage = 2; // transition to stage 2
}
}
}
}
// translate until gap +
void phase_1_2() {
// get sensor readings - necessary to keep all values updated
luna_front = get_luna_front();
luna_rear = get_luna_rear();
luna_right = get_luna_right();
luna_left = get_luna_left();
bool stopTranslateCondition = luna_front > (FRONT_START_CM + 30);
if ( stopTranslateCondition ) {
if ( !start_interval ) {
prev_time = millis();
start_interval = true;
}
else {
if ( (millis() - prev_time) > 650 ) {
move_fwd( 0 );
start_interval = false;
phase_1_stage = 3; // transition to stage 3
}
else {
if ( side_of_board ) {
move_right( 30 );
}
else {
move_left( 30 );
}
}
}
} else {
if ( side_of_board ) {
move_right( 30 );
}
else {
move_left( 30 );
}
}
}
// fwd until just past gap
void phase_1_3() {
// get sensor readings - necessary to keep all values updated
luna_front = get_luna_front();
luna_rear = get_luna_rear();
luna_right = get_luna_right();
luna_left = get_luna_left();
// was (luna_front < 150) && (luna_rear > 30)
if ( (luna_front < 132) && (luna_rear > 30) ) { // magic number is a measurement-derived test value
move_fwd( 0 );
phase_1_stage = 4;
}
else if ( (luna_rear < (2*PROXIMITY_TOL_CM)) && (luna_front > 160) ){
move_fwd( 30 );
}
else if ( (luna_rear < (3*PROXIMITY_TOL_CM)) && (luna_front > 170) ){
move_fwd( 55 );
}
else {
move_fwd( 70 );
}
}
// translate until wall +
void phase_1_4() {
// get sensor readings - necessary to keep all values updated
luna_front = get_luna_front();
luna_rear = get_luna_rear();
luna_right = get_luna_right();
luna_left = get_luna_left();
if ( side_of_board ) {
if ( luna_right > (PROXIMITY_TOL_CM + 2) ) { // CHANGE: was +3
move_right( 30 );
}
else {
move_right( 0 );
phase_1_stage = 5;
}
}
else {
if ( luna_left > (PROXIMITY_TOL_CM + 2) ) { //CHANGE: was + 3 // FINETUNED
move_left( 30 );
}
else {
move_left( 0 );
phase_1_stage = 5;
}
}
}
// move fwd until wall (hit contact along way)
void phase_1_5() {
// get sensor readings - necessary to keep all values updated
luna_front = get_luna_front();
luna_rear = get_luna_rear();
luna_right = get_luna_right();
luna_left = get_luna_left();
if ( luna_front < (PROXIMITY_TOL_CM + 2) ) {
move_fwd( 0 );
phase_1_stage = 6;
}
else {
move_fwd( 50 );
}
if ( (luna_left < (PROXIMITY_TOL_CM + 8)) && (luna_left > (PROXIMITY_TOL_CM + 2)) ) {
move_left( 20 );
}
else if ( (luna_right < (PROXIMITY_TOL_CM + 8)) && (luna_right > (PROXIMITY_TOL_CM + 2)) ) {
move_right( 20 );
}
}
// dispense balls and hold timer
void phase_1_6() {
curr_time = millis();
if ( !start_interval ) {
prev_time = millis();
curr_time = millis();
start_interval = true;
if ( side_of_board ) {
servo1.write( CENTER_ANGLE + 10 );
}
else {
servo1.write( CENTER_ANGLE - 10 );
}
}
else if ( (curr_time - prev_time) > OFFLOAD_TIME_MS ) {
// move dispense actuator to position 0
dispenser_rotate_center();
phase_1_stage = 7;
start_interval = false;
}
else {
if ( !start_interval_dispense ) {
prev_time_dispense = millis();
start_interval_dispense = true;
}
// DISPENSE BALLS
if ( side_of_board ) {
// dispense right
dispenser_rotate_right( curr_time, prev_time_dispense );
}
else {
// dispense left
dispenser_rotate_left( curr_time, prev_time_dispense );
}
}
}
// REVISED 1.7 TO EXCLUDE RAMP. IF RAMP, COMMENT THIS OUT AND INCLUDE THE OTHER phase_1_7() THROUGH phase_1_11().
void phase_1_7() {
// get sensor readings - necessary to keep all values updated
luna_front = get_luna_front();
luna_rear = get_luna_rear();
luna_right = get_luna_right();
luna_left = get_luna_left();
if ( side_of_board ) {
if ( luna_rear > REV_WALL_DIST_CM ) {
if ( !start_interval ) {
prev_time = millis();
start_interval = 1;
}
else {
if ( (millis() - prev_time) > 650 ) { // THIS ALSO HAS TO BE DETERMINED THROUGH EXPERIMENT AND DEPENDS ON SPEED
move_left( 0 );
start_interval = 0;
phase_1_stage = 12;
}
}
}
else {
move_left( 30 );
}
}
else {
if ( luna_rear > REV_WALL_DIST_CM ) {
if ( !start_interval ) {
prev_time = millis();
start_interval = 1;
}
else {
if ( (millis() - prev_time) > 650 ) { // THIS ALSO HAS TO BE DETERMINED THROUGH EXPERIMENT AND DEPENDS ON SPEED
move_right( 0 );
start_interval = 0;
phase_1_stage = 12;
}
}
}
else {
move_right( 30 );
}
}
}
void phase_1_8() {
return;
}
void phase_1_9() {
return;
}
void phase_1_10() {
return;
}
void phase_1_11() {
return;
}
/*
// reverse until wall
void phase_1_7() {
// get sensor readings - necessary to keep all values updated
luna_front = get_luna_front();
luna_rear = get_luna_rear();
luna_right = get_luna_right();
luna_left = get_luna_left();
if ( luna_rear < (PROXIMITY_TOL_CM + 12) ) {
move_rev( 0 );
phase_1_stage = 8;
}
else {
move_rev( 40 );
}
}
// translate in + direction until wall + tol
void phase_1_8() {
// get sensor readings - necessary to keep all values updated
luna_front = get_luna_front();
luna_rear = get_luna_rear();
luna_right = get_luna_right();
luna_left = get_luna_left();
if ( side_of_board ) {
if ( luna_left > (PROXIMITY_TOL_CM + 10) ) {
move_left( 30 );
}
else {
move_left( 0 );
phase_1_stage = 9;
}
}
else {
if ( luna_right > (PROXIMITY_TOL_CM + 10) ) {
move_right( 30 );
}
else {
move_right( 0 );
phase_1_stage = 9;
}
}
}
// move fwd up ramp
void phase_1_9() {
if ( !start_interval ) {
prev_time = millis();
start_interval = true;
}
else if ( (millis() - prev_time) > RAMP_TIME_MS ) {
move_fwd( 0 );
start_interval = false;
phase_1_stage = 10;
}
else {
move_fwd( 18 );
}
}
// reverse down ramp
void phase_1_10() {
if ( !start_interval ) {
prev_time = millis();
start_interval = true;
}
else if ( (millis() - prev_time) > (0.5*RAMP_TIME_MS) ) {
move_rev( 0 );
start_interval = false;
phase_1_stage = 11;
}
else {
move_rev( 20 );
}
}
// translate until gap in -
void phase_1_11() {
// get sensor readings - necessary to keep all values updated
luna_front = get_luna_front();
luna_rear = get_luna_rear();
luna_right = get_luna_right();
luna_left = get_luna_left();
if ( luna_rear > ( 40 ) ) {
if ( !start_interval ) {
prev_time = millis();
start_interval = true;
}
else if ( (millis() - prev_time) > 100 ) { // THIS DEPENDS ON THE SPEED USED AND HAS TO BE TESTED
move_fwd( 0 );
start_interval = false;
phase_1_stage = 12;
}
}
else {
if ( side_of_board ) {
move_right( 40 );
}
else {
move_left( 40 );
}
}
}
*/
// reverse until wall
void phase_1_12() {
// get sensor readings - necessary to keep all values updated
luna_front = get_luna_front();
luna_rear = get_luna_rear();
luna_right = get_luna_right();
luna_left = get_luna_left();
if ( luna_rear < (4.25*PROXIMITY_TOL_CM) ) {
move_rev( 0 );
phase_1_stage = 13;
}
else if ( (luna_rear < (5*PROXIMITY_TOL_CM)) && (luna_front > (5*PROXIMITY_TOL_CM)) )
{
move_rev( 30 );
}
else if ( (luna_front < (3*PROXIMITY_TOL_CM)) && (luna_rear > (5*PROXIMITY_TOL_CM)) )
{
move_rev( 30 );
}
else if ( (luna_front < (4*PROXIMITY_TOL_CM)) && (luna_rear > (5*PROXIMITY_TOL_CM)) )
{
move_rev( 55 );
}
else if ( (luna_front < (5.5*PROXIMITY_TOL_CM)) && (luna_rear > (5*PROXIMITY_TOL_CM)) )
{
move_rev( 75 );
}
else {
move_rev( 95 );
}
}
// translate in - until start
void phase_1_13() {
// get sensor readings - necessary to keep all values updated
luna_front = get_luna_front();
luna_rear = get_luna_rear();
luna_right = get_luna_right();
luna_left = get_luna_left();
if ( side_of_board ) {
if ( luna_left < (2*PROXIMITY_TOL_CM) ) {
move_left( 0 );
phase_1_stage = 999;
phase_2_stage = 1;
delay( RELOAD_TIME );
}
else {
move_left( 40 );
}
}
else {
if ( luna_right < (2*PROXIMITY_TOL_CM) ) {
move_right( 0 );
phase_1_stage = 999;
phase_2_stage = 1;
delay( RELOAD_TIME );
}
else {
move_right( 40 );
}
}
}
// begin phase 2: orient
void phase_2_1() {
// get sensor readings
luna_front = get_luna_front();
luna_rear = get_luna_rear();
luna_right = get_luna_right();
luna_left = get_luna_left();
// rotate ccw until (left or right) and rear lidar read same value. use known frontal tolerance to approximate correct orientation, also use (other side sensor)
bool stopConditionLeftSide = ( abs( luna_right + luna_left + WIDTH_OF_BOT - COURSE_WIDTH ) < 2 ) && ( abs( luna_front + luna_rear + LENGTH_OF_BOT - COURSE_LENGTH ) < 2 ) && ( luna_left < luna_right ) && ( luna_rear < luna_front ) && ( luna_front < 130 ) && ( luna_rear < 130 ) && ( luna_left < 130 ) && ( luna_right < 130 );
bool stopConditionRightSide = ( abs( luna_right + luna_left + WIDTH_OF_BOT - COURSE_WIDTH ) < 2 ) && ( abs( luna_front + luna_rear + LENGTH_OF_BOT - COURSE_LENGTH ) < 2 ) && ( luna_left > luna_right ) && ( luna_rear < luna_front ) && ( luna_front < 130 ) && ( luna_rear < 130 ) && ( luna_left < 130 ) && ( luna_right < 130 );
/*
if ( stopConditionLeftSide ) {
side_of_board = true; // orients all other commands. left => robot moves right toward goal. + -> right, - -> left.
stop_rotation = true;
}
else if ( stopConditionRightSide ) {
side_of_board = false; // orients all other commands. right => robot moves left toward goal.
stop_rotation = true;
}
else {
move_rotate( 20 );
}
if ( stop_rotation ) {
if ( side_of_board ) {
move_left( 15 );
}
else {
move_right( 15 );
}
if ( !start_interval ) {
prev_time = millis();
start_interval = true;
}
else {
if ( (millis() - prev_time) > (0.5*START_REV_TIME_MS) ) {
move_right( 0 );
start_interval = false;
stop_rotation = false;
phase_2_stage = 2; // transition to stage 2
}
}
}
*/
phase_2_stage = 2;
}
// translate until gap
void phase_2_2() {
// get sensor readings - necessary to keep all values updated
luna_front = get_luna_front();
luna_rear = get_luna_rear();
luna_right = get_luna_right();
luna_left = get_luna_left();
bool stopTranslateCondition = (luna_front > (FRONT_START_CM + 30));
if ( stopTranslateCondition ) {
if ( !start_interval ) {
prev_time = millis();
start_interval = true;
}
else {
if ( (millis() - prev_time) > 650 ) {
move_fwd( 0 );
start_interval = false;
phase_2_stage = 3; // transition to stage 3
}
else {
if ( side_of_board ) {
move_right( 30 );
}
else {
move_left( 30 );
}
}
}
} else {
if ( side_of_board ) {
move_right( 30 );
}
else {
move_left( 30 );
}
}
}
// move fwd until wall
void phase_2_3() {
// get sensor readings - necessary to keep all values updated
luna_front = get_luna_front();
luna_rear = get_luna_rear();
luna_right = get_luna_right();
luna_left = get_luna_left();
if ( luna_front < (2.5*PROXIMITY_TOL_CM) ) {
move_fwd( 0 );
phase_2_stage = 4;
}
else if ( (luna_front < (3.5*PROXIMITY_TOL_CM)) && (luna_rear > (5*PROXIMITY_TOL_CM)) ) {
move_fwd( 20 );
}
else if ( (luna_rear < (2*PROXIMITY_TOL_CM)) && (luna_front > (5*PROXIMITY_TOL_CM)) ) {
move_fwd( 30 );
}
else if ( (luna_rear < (4*PROXIMITY_TOL_CM)) && (luna_front > (5*PROXIMITY_TOL_CM)) ) {
move_fwd( 50 );
}
else if ( (luna_rear < (5.5*PROXIMITY_TOL_CM)) && (luna_front > (5*PROXIMITY_TOL_CM)) ) {
move_fwd( 75 );
}
else {
move_fwd( 90 );
}
}
// translate until wall (in + direction)
void phase_2_4() {
// get sensor readings - necessary to keep all values updated
luna_front = get_luna_front();
luna_rear = get_luna_rear();
luna_right = get_luna_right();
luna_left = get_luna_left();
if ( side_of_board ) {
if ( luna_right < (PROXIMITY_TOL_CM + 2) ) {
move_right( 0 );
phase_2_stage = 5;
}
else {
move_right( 30 );
}
}
else {
if ( luna_left < (PROXIMITY_TOL_CM + 2) ) {
move_left( 0 );
phase_2_stage = 5;
}
else {
move_left( 30 );
}
}
if ( (luna_front > (PROXIMITY_TOL_CM + 5)) ) {
move_fwd( 20 );
}
}
// drop balls
void phase_2_5() {
curr_time = millis();
if ( !start_interval ) {
prev_time = millis();
curr_time = millis();
start_interval = true;
if ( side_of_board ) {
servo1.write( CENTER_ANGLE + 10 );
}
else {
servo1.write( CENTER_ANGLE - 10 );
}
}
else if ( (curr_time - prev_time) > OFFLOAD_TIME_MS ) {
// move dispense actuator to position 0
dispenser_rotate_center();
phase_2_stage = 6;
start_interval = false;
}
else {
if ( !start_interval_dispense ) {
prev_time_dispense = millis();
start_interval_dispense = true;
}
// DISPENSE BALLS
if ( side_of_board ) {
// dispense right
dispenser_rotate_right( curr_time, prev_time_dispense );
}
else {
// dispense left
dispenser_rotate_left( curr_time, prev_time_dispense );
}
}
}
// translate - direction until gap
void phase_2_6() {
// get sensor readings - necessary to keep all values updated
luna_front = get_luna_front();
luna_rear = get_luna_rear();
luna_right = get_luna_right();
luna_left = get_luna_left();
if ( side_of_board ) {
if ( luna_rear > REV_WALL_DIST_CM ) {
if ( !start_interval ) {
prev_time = millis();
start_interval = 1;
}
else {
if ( (millis() - prev_time) > 650 ) { // THIS ALSO HAS TO BE DETERMINED THROUGH EXPERIMENT AND DEPENDS ON SPEED
move_left( 0 );
start_interval = 0;
phase_2_stage = 7;
}
}
}
else {
move_left( 30 );
}
}
else {
if ( luna_rear > REV_WALL_DIST_CM ) {
if ( !start_interval ) {
prev_time = millis();
start_interval = 1;
}
else {
if ( (millis() - prev_time) > 650 ) { // THIS ALSO HAS TO BE DETERMINED THROUGH EXPERIMENT AND DEPENDS ON SPEED
move_right( 0 );
start_interval = 0;
phase_2_stage = 7;
}
}
}
else {
move_right( 30 );
}
}
}
// reverse until wall
void phase_2_7() {
// get sensor readings - necessary to keep all values updated
luna_front = get_luna_front();
luna_rear = get_luna_rear();
luna_right = get_luna_right();
luna_left = get_luna_left();
if ( luna_rear < (3*PROXIMITY_TOL_CM) ) {
move_rev( 0 );
phase_2_stage = 8;
}
else if ( luna_front < (2*PROXIMITY_TOL_CM) ) {
move_rev( 20 );
}
else if ( luna_front < (3*PROXIMITY_TOL_CM) ) {
move_rev( 45 );
}
else if ( (luna_front < (4.5*PROXIMITY_TOL_CM)) && (luna_rear > (5*PROXIMITY_TOL_CM))) {
move_rev( 65 );
}
else if ( (luna_rear < (4.5*PROXIMITY_TOL_CM)) && (luna_front > (5*PROXIMITY_TOL_CM)) ) {
move_rev( 30 );
}
else {
move_rev( 80 );
}
}
// translate in - direction until wall
void phase_2_8() {
// get sensor readings - necessary to keep all values updated
luna_front = get_luna_front();
luna_rear = get_luna_rear();
luna_right = get_luna_right();
luna_left = get_luna_left();
if ( side_of_board ) {
if ( luna_left < (1.5*PROXIMITY_TOL_CM) ) {
move_left( 0 );
delay( RELOAD_TIME );
phase_2_stage = 1;
}
else {
move_left( 30 );
}
}
else {
if ( luna_right < (1.5*PROXIMITY_TOL_CM) ) {
move_right( 0 );
delay( RELOAD_TIME );
phase_2_stage = 1;
}
else {
move_right( 30 );
}
}
}
// --------------------------------------------------------------------------------
/*
- main loop
*/
void loop() {
//get_all_sensors();
// dispenser_rotate_right();
// delay( 2000 );
// dispenser_rotate_center();
// delay( 2000 );
if ( phase_1_stage == 1 ) {
phase_1_1();
}
else if ( phase_1_stage == 2 ) {
phase_1_2();
}
else if ( phase_1_stage == 3 ) {
phase_1_3();
}
else if ( phase_1_stage == 4 ) {
phase_1_4();
}
else if ( phase_1_stage == 5 ) {
phase_1_5();
}
else if ( phase_1_stage == 6) {
phase_1_6();
}
else if ( phase_1_stage == 7 ) {
phase_1_7();
}
else if ( phase_1_stage == 8 ) {
phase_1_8();
}
else if ( phase_1_stage == 9 ) {
phase_1_9();
}
else if ( phase_1_stage == 10 ) {
phase_1_10();
}
else if ( phase_1_stage == 11 ) {
phase_1_11();
}
else if ( phase_1_stage == 12 ) {
phase_1_12();
}
else if ( phase_1_stage == 13 ) {
phase_1_13();
}
else if ( phase_2_stage == 1 ) {
phase_2_1();
}
else if ( phase_2_stage == 2 ) {
phase_2_2();
}
else if ( phase_2_stage == 3 ) {
phase_2_3();
}
else if ( phase_2_stage == 4 ) {
phase_2_4();
}
else if ( phase_2_stage == 5 ) {
phase_2_5();
}
else if ( phase_2_stage == 6 ) {
phase_2_6();
}
else if ( phase_2_stage == 7 ) {
phase_2_7();
}
else if ( phase_2_stage == 8 ) {
phase_2_8();
}
// exit sequence
if ( (millis() - start_time_ms) > TOTAL_TIME_MS ) {
phase_1_stage = 999;
phase_2_stage = 999;
move_fwd( 0 );
digitalWrite( SPEAKER_PIN, HIGH );
if ( side_of_board ) {
servo1.write( CENTER_ANGLE + OFFSET_ANGLE_RIGHT );
}
else {
servo1.write( CENTER_ANGLE + OFFSET_ANGLE_LEFT );
}
}
}
Primary Control Code:
/*
- This script controls the motor control Arduino.
- Input: UART from master Arduino (command and power level).
- Output: Motor control commands.
*/
#include "AccelStepper.h"
#include
// --------------------------------------------------------------------------------
/*
- ALL CONSTANTS DEFINED BELOW. Also motors initialized.
- Layout: stepper1 NW, stepper2 NE, stepper3 SE, stepper4 SW.
- Steppers initialized as AccelStepper objects.
*/
#define RX0 0;
#define TX0 1;
#define numsteps 200
#define MAX_SPEED 1000
#define MAX_PL 15
#define dirPin1 7
#define stepPin1 4
#define dirPin2 5
#define stepPin2 2
#define dirPin3 6
#define stepPin3 3
#define dirPin4 13
#define stepPin4 12
#define motorInterfaceType 1
AccelStepper stepper1 = AccelStepper(motorInterfaceType, stepPin1, dirPin1);
AccelStepper stepper2 = AccelStepper(motorInterfaceType, stepPin2, dirPin2);
AccelStepper stepper3 = AccelStepper(motorInterfaceType, stepPin3, dirPin3);
AccelStepper stepper4 = AccelStepper(motorInterfaceType, stepPin4, dirPin4);
const unsigned char UPPER_4_BIT_MASK = 0xF0; // 11110000
const unsigned char LOWER_4_BIT_MASK = 0x0F; // 00001111
// --------------------------------------------------------------------------------
/*
- HELPER FUNCTIONS
- Directional control:
- move_fwd( int speed );
- move_rev( int speed );
- move_left( int speed );
- move_right( int speed );
- speed given as percentage of max speed (0:100 maps to 0:1000)
*/
void move_fwd( int speed ) {
stepper1.setSpeed( speed ); // LR
stepper2.setSpeed( speed ); // LF
stepper3.setSpeed( -speed ); // RF
stepper4.setSpeed( -speed ); // RR
}
void move_rev( int speed ) {
stepper1.setSpeed( -speed ); // LR
stepper2.setSpeed( -speed ); // LF
stepper3.setSpeed( speed ); // RF
stepper4.setSpeed( speed ); // RR
}
void move_left( int speed ) {
stepper1.setSpeed( speed );
stepper2.setSpeed( -speed );
stepper3.setSpeed( -speed );
stepper4.setSpeed( speed );
}
void move_right( int speed ) {
stepper1.setSpeed( -speed );
stepper2.setSpeed( speed );
stepper3.setSpeed( speed );
stepper4.setSpeed( -speed );
}
void rotate( int speed ) {
stepper1.setSpeed( speed );
stepper2.setSpeed( speed );
stepper3.setSpeed( speed );
stepper4.setSpeed( speed );
}
// --------------------------------------------------------------------------------
/*
- Components tested:
*/
void setup() {
Serial.begin(9600);
stepper1.setMaxSpeed(MAX_SPEED);
stepper2.setMaxSpeed(MAX_SPEED);
stepper3.setMaxSpeed(MAX_SPEED);
stepper4.setMaxSpeed(MAX_SPEED);
}
// --------------------------------------------------------------------------------
/*
- main loop
*/
void loop() {
if ( Serial.available() ) {
// decode command
byte data_recv = Serial.read();
int command = (data_recv & UPPER_4_BIT_MASK) >> 4;
int speed = map( data_recv & LOWER_4_BIT_MASK, 0, MAX_PL, 0, MAX_SPEED );
// execute commands
if ( command == 1 ) {
move_fwd( speed );
}
else if ( command == 2 ) {
move_rev( speed );
}
else if ( command == 3 ) {
move_left( speed );
}
else if ( command == 4 ) {
move_right( speed );
}
else if ( command == 5 ) {
rotate( speed );
}
}
// move_right( 200 );
// continually run motors
stepper1.runSpeed();
stepper2.runSpeed();
stepper3.runSpeed();
stepper4.runSpeed();
}