Palo Alto Dynamics
Changing Your Idea of What Robots Can(not) Do.
Changing Your Idea of What Robots Can(not) Do.
Our most powerful robot yet. Now with one less wheel.
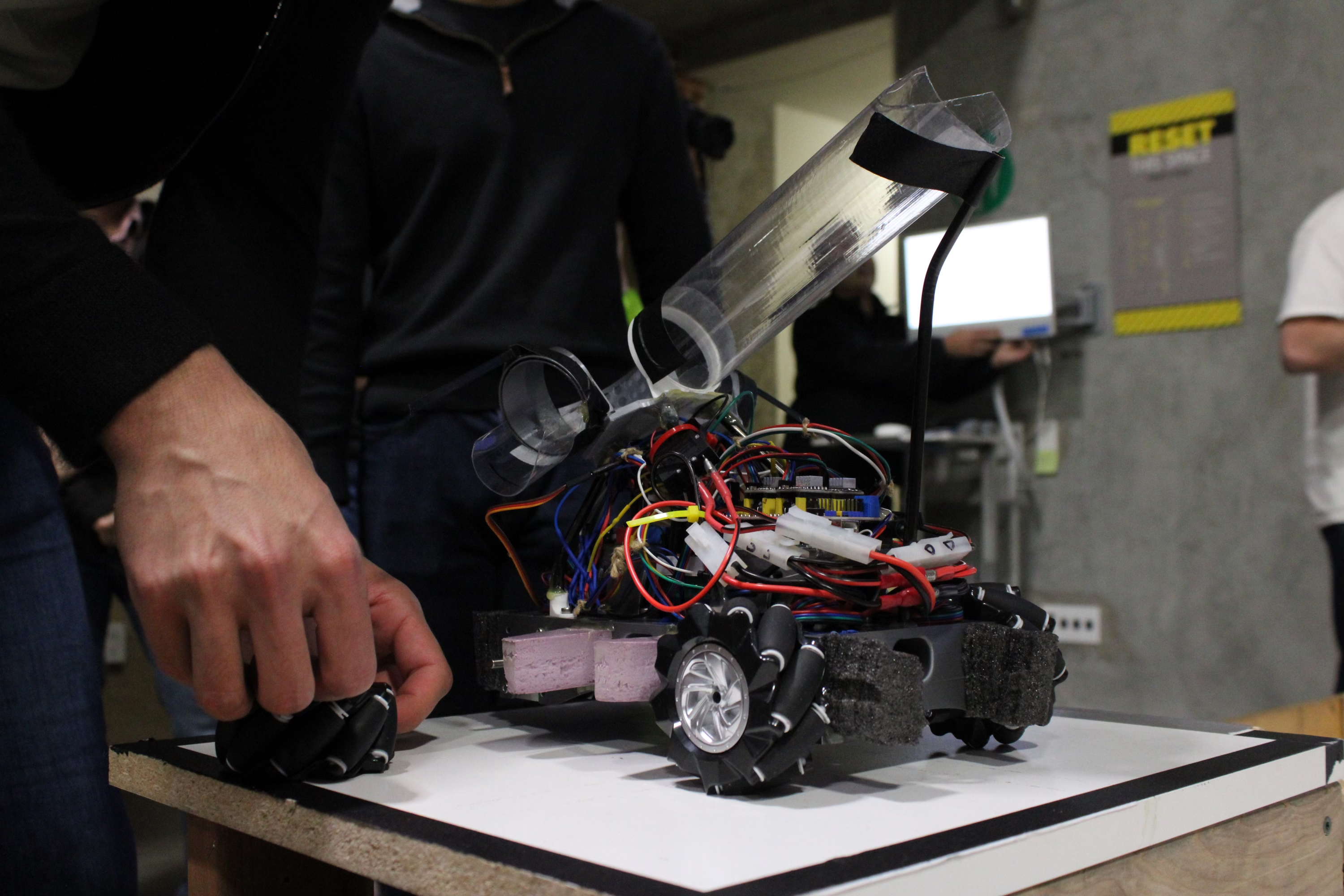
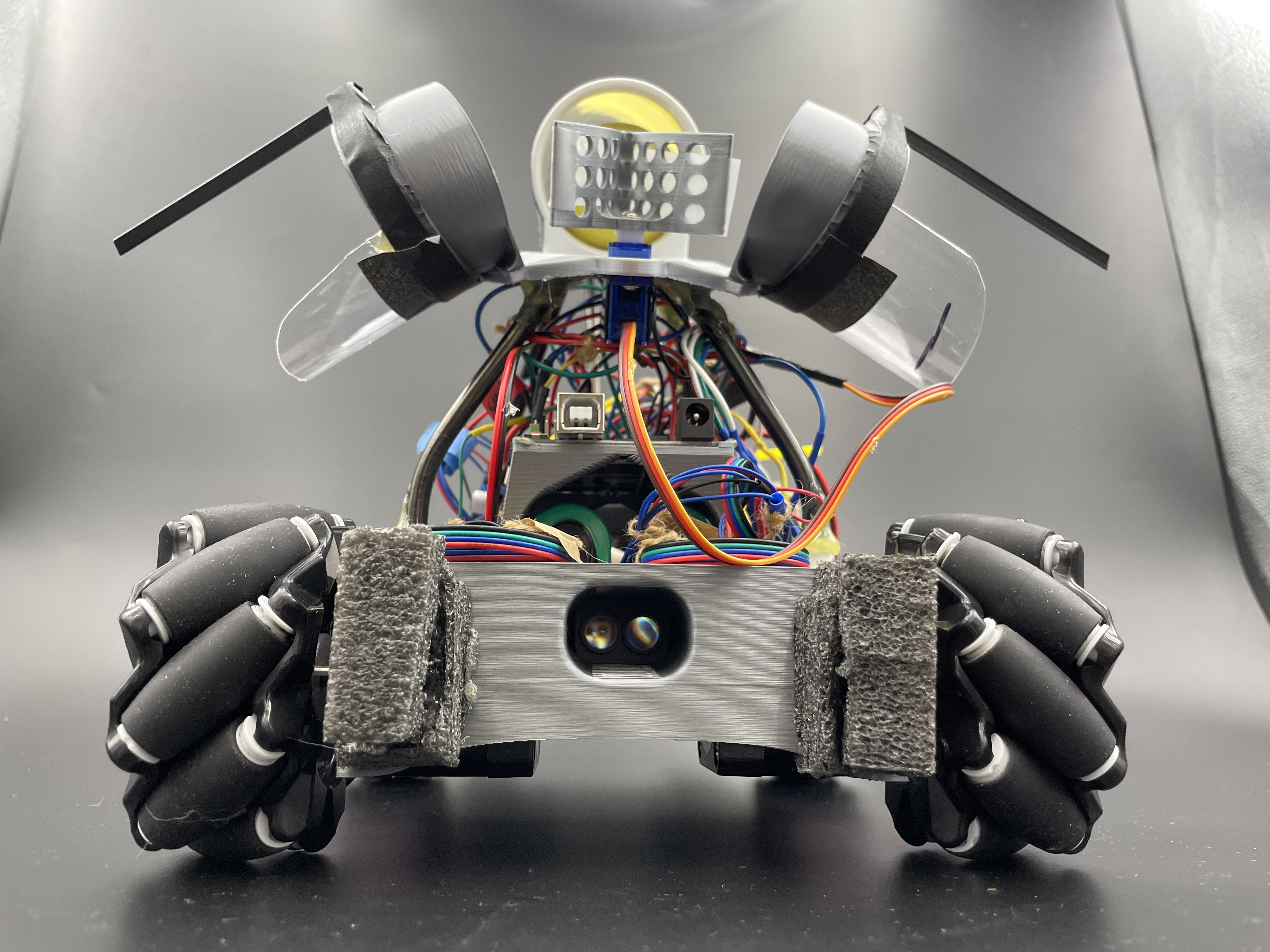
Introducing the Palo Alto Dynamics Pro Max 3/4 Edition. Forget sleek, chrome exteriors. The Pro Max boasts a rugged, 3D-printed chassis, overflowing with a certain...industrial charm. Imagine a machine that scales ramps with the grace of a mountain goat and changes direction on a dime.
Witness the Pro Max deliver its cargo with unmatched precision, unleashing its revolutionary ziptie technology on unsuspecting contacts. Because in the world of robotics, sometimes, a little (or a lot) of noise is music to your ears. Enter the Pro Max 3/4 Edition. Enter the future.
Design choices, components, manufacturing methods
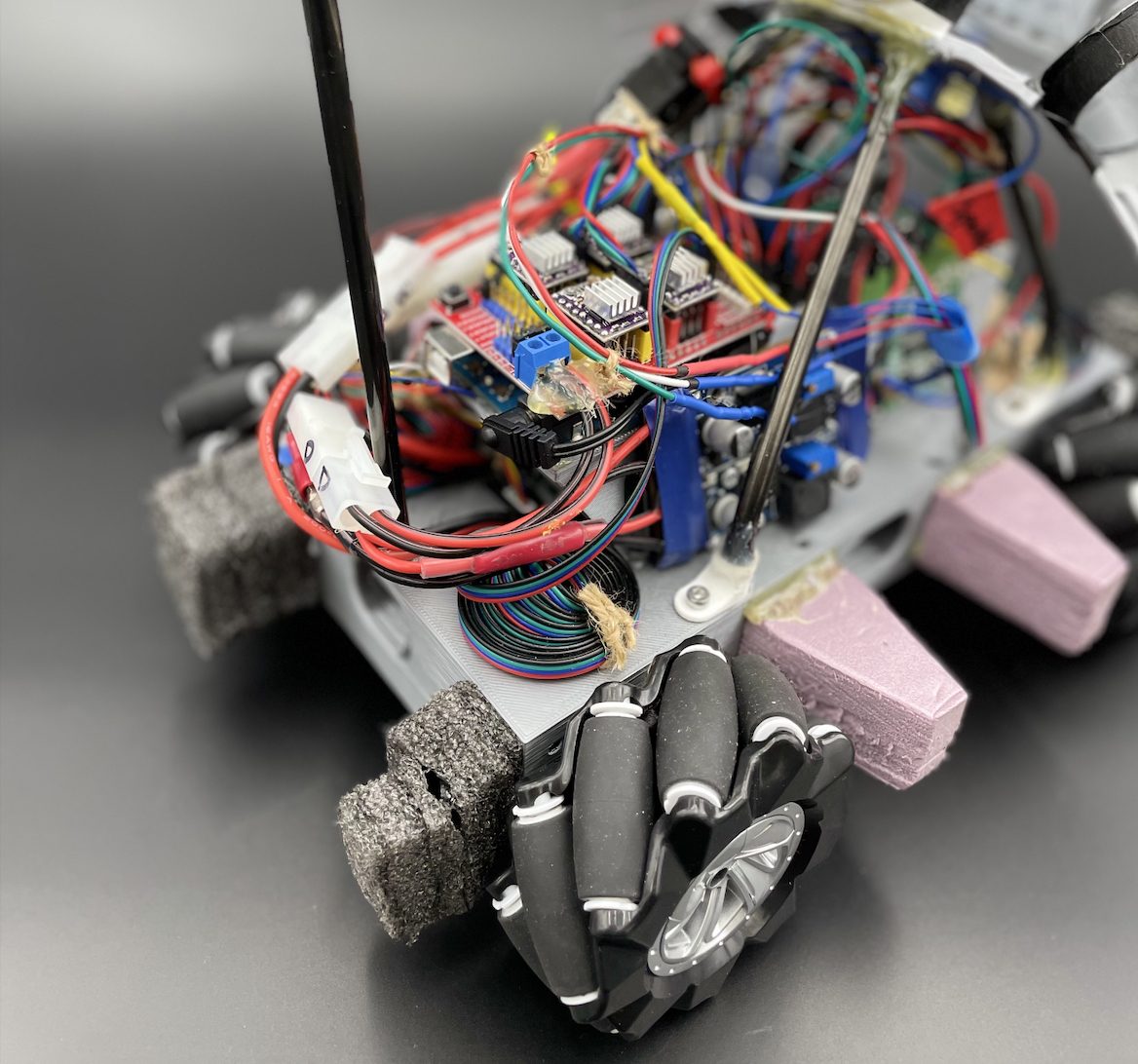
Chassis Design and Mechanical Architecture covers the primary design features of the robot. Included is coverage of chassis design and build, wheel selection and accommodation, and an introduction of motor and payload configuration and integration.
Design choices, components, build and test methods
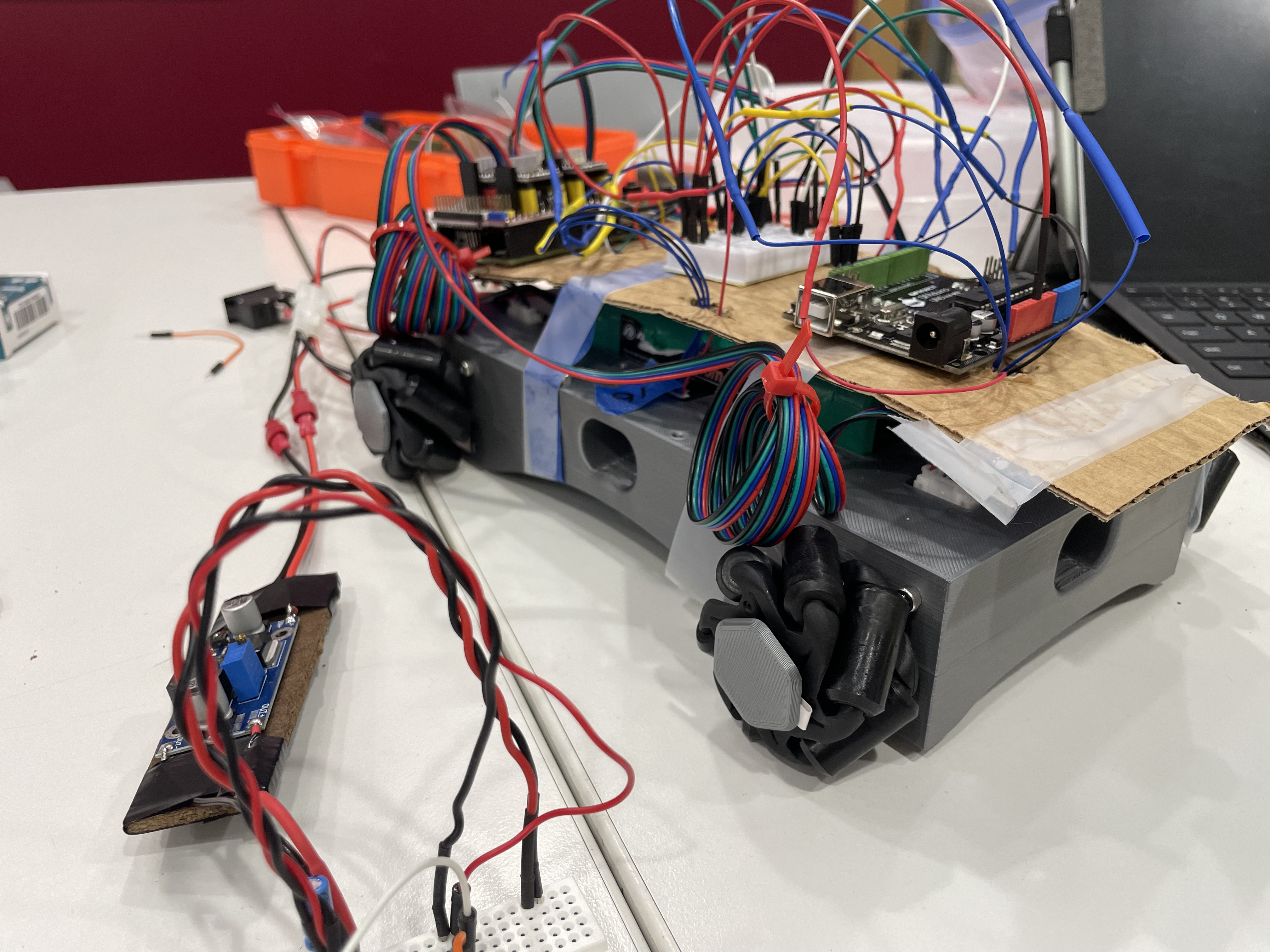
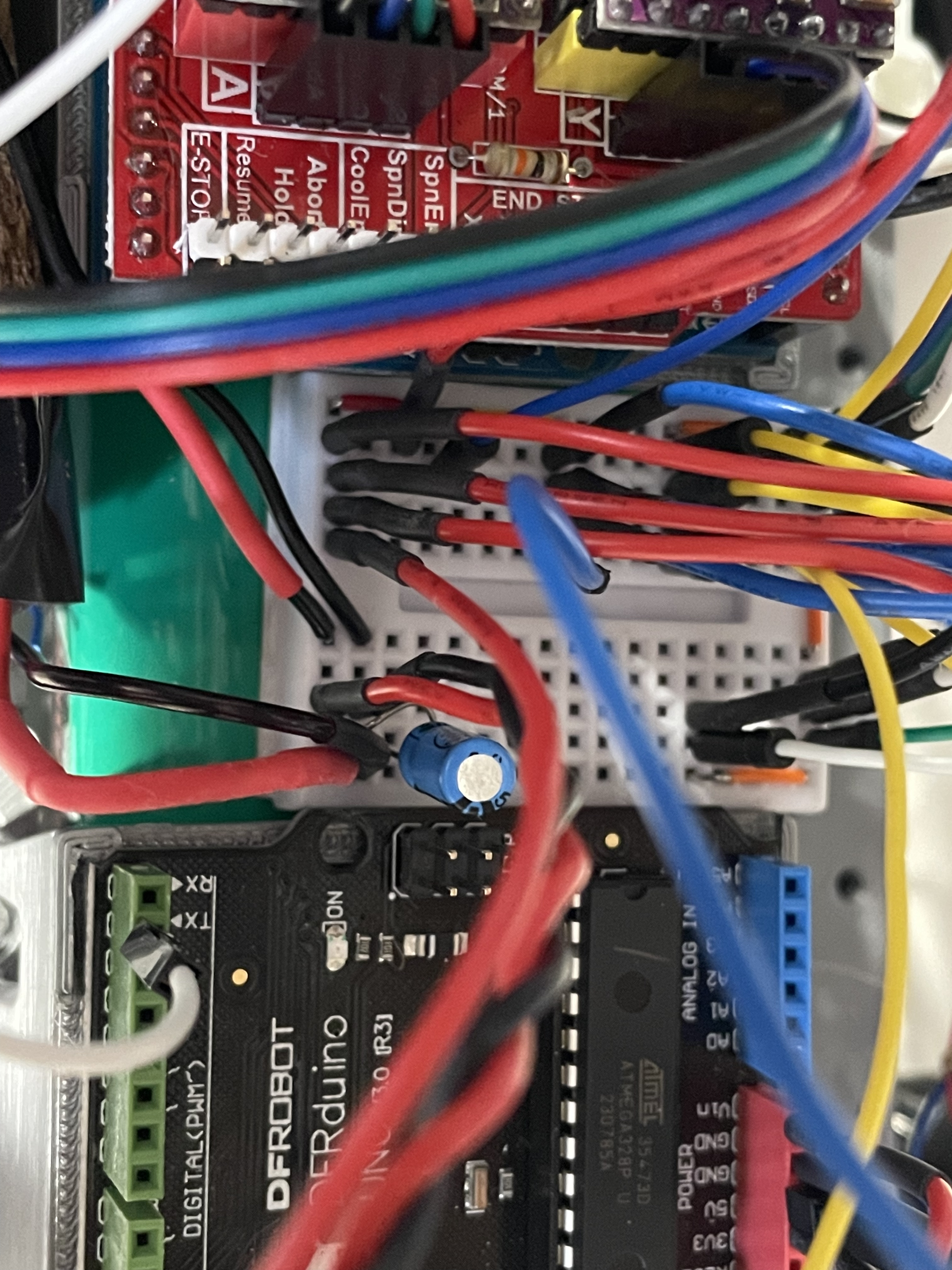
Drive, Power Systems, and Motor Control covers all mechanisms, components, and control circuitry required for operation of the drive elements of the robot. Included are motors and motor control hardware, as well as power requirements, supply, and regulation for all subsystems.
Delivery mechanism design, components, manufacturing, testing
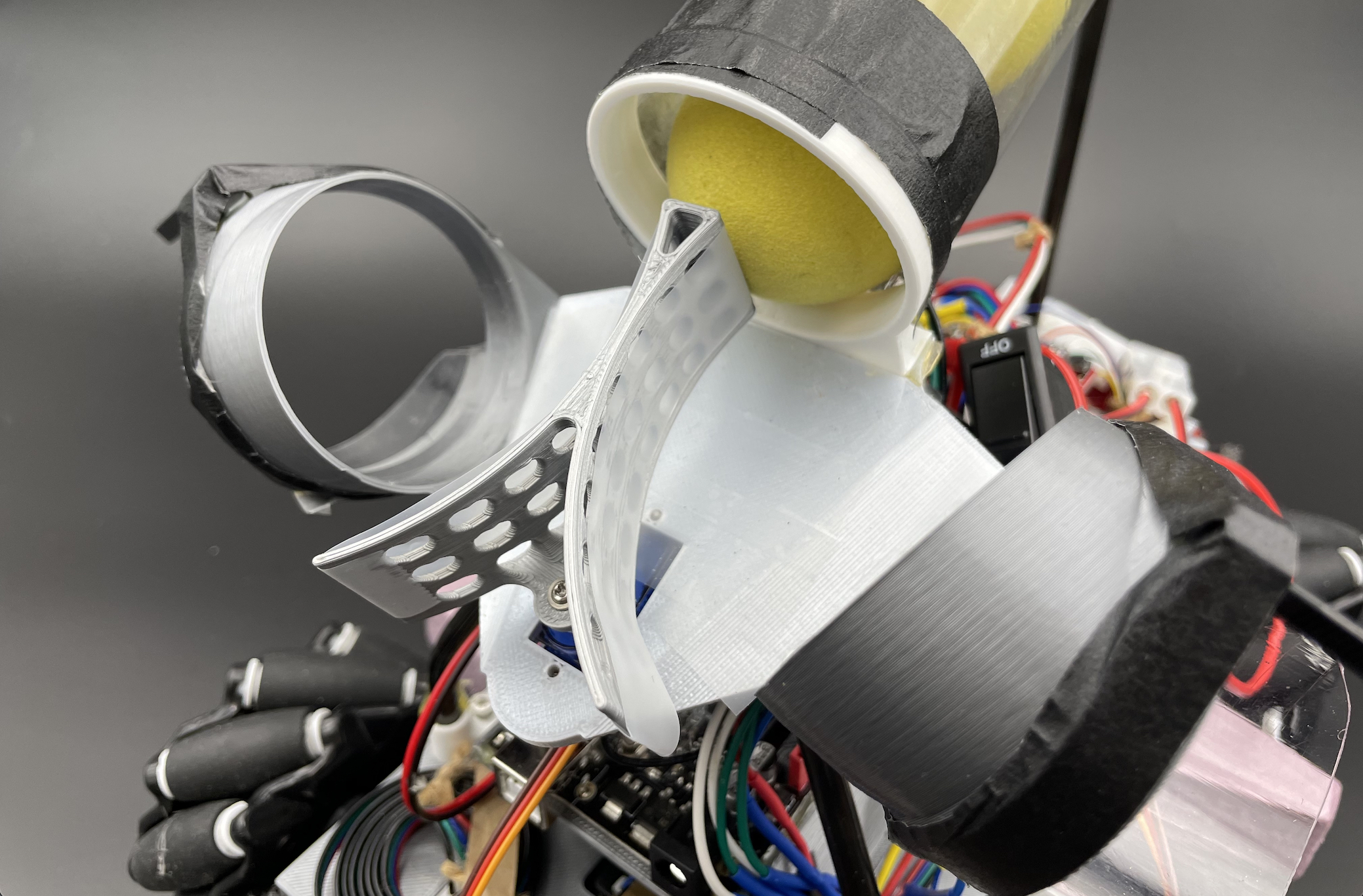
Payload Systems covers structures and mechanisms supporting ball deposition into the goal area. Included in Payload Systems are the ball delivery superstructure and the servo control system for two-sided ball delivery capability.
Sensing and control, design considerations, and components
Sensing Systems covers primary sensors and control strategies required for navigation through the course. Included in Sensing Systems is an overview of LiDAR sensor selection, navigation strategies enabled by LiDAR sensors, and various control strategies for handling movements around the game board.
Inter-Computer Communication, Code design and considerations
Code covers the software requirements which arise from a two-Arduino configuration, as well as a general overview of the multi-phase control strategy used in the game. Of special focus is the inter-computer communication strategy employed to reduce single-microcontroller computational load and the modular components used to construct the state machine in code.
ME210 (Winter, 2024)
Chassis design and architecture.
Electrical systems and integration.
Payload systems.
Sensors.